RVO(Reciprocal Velocity Obstacles,互惠速度障碍)是一种多人动态避障算法。
「数据结构与算法 - JPS 」兄弟篇
前言
如果 A*、JPS 等寻路算法解决的是“如何到达目的地”,那么 RVO 解决的就是“在移动过程中,如何避免与动态目标发生碰撞”。常用于游戏中多单位在移动过程中实现自动避让,比如:红警、星际争霸等RTS游戏。
可以通俗的理解为:每个移动的单位都会主动互相让一点,避免路径撞车。
这类动态避障算法的核心思想是:“按照当前速度继续移动,未来会不会发生碰撞?”,也就是 Velocity Obstacle(速度障碍)。
设想以下场景,
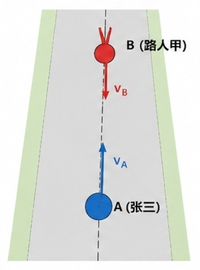
张三和路人甲正在骑行道上相向而行,不出意外的话,待会可能就要出意外了。
不过当对方进入可视范围后,张三会下意识的考虑是否需要减速或稍微改变既定方向进行避让,从而避免意外。
这是大脑做出的预测行为,而 VO 就是对这种未来碰撞预测的数学模型,RVO、ORCA则是基于它的具体算法实现。
Velocity Obstacle
顾名思义,VO 中的“障碍”指的不是当前位置上的障碍物,而是会导致未来发生碰撞的速度集合。
通俗地说,VO 关心的不是现在离得近不近,而是:“如果双方都按照当前速度继续运动,未来是否会发生碰撞?”。
举个例子,
如果张三和路人甲并排但朝着同一方向行驶,即使当前位置很接近,在未来一段时间也未必会发生碰撞。
相反,
张三和路人相向行驶,即使当前距离很远,但如果双方正以相对速度高速接近,那么在未来一段时间内就存在碰撞风险。
所以,VO 关注的其实是:当前速度是否会把自己带入未来的碰撞轨迹。
从这个角度来看,刚好可以把速度分为两类:
有撞车风险的速度 -> 危险速度
无撞车风险的速度 -> 安全速度
而 VO 就是把速度空间中未来会发生碰撞的速度圈定,从几何图形上来看这是一个锥形区域,也称为:Velocity Obstacle Cone。
再举个例子,
张三在左边,路人甲在右边。为了判断张三会不会撞上路人甲,可以把两者的半径合成更大的圆,即:
以张三的视角来看,他只要进入这个“膨胀后的圆”,就会发生碰撞。从张三的位置向这个圆的两侧切线,会形成一个锥形区域。
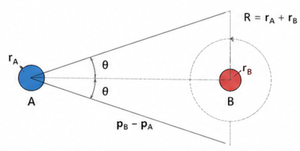
如果张三的相对速度落在这个锥形内部,他最终会穿过这个“膨胀后的圆”,也就是发生碰撞。所以可以得出结论:
锥形内部 -> 危险速度
锥形外部 -> 安全速度
既然已经知道相对速度落在锥体内就会碰撞,那么接下来的问题就是:如何在速度空间中构造出这个锥形区域,并判断哪些速度属于危险速度?
直接上代码:
1 | // agent.rs |
1 | // main.rs |
现在张三已经会自动避让了,但在一些场景下会出现抖动,甚至是反复横跳。
这是因为 VO 的避障决策本质上是单边的:张三在选择新速度时,会假设路人甲保持当前速度不变,然后由自己单方面完成避让。
但真实情况是,路人甲往往也在同时避让。这样一来,双方都可能按照“由我来避开对方”的思路做出决策,例如同时向左避让,又同时改为向右避让,结果就是运动轨迹抖动。
要避免这种情况,就不能只让一方单方面避让,而是要让双方共同承担避让责任。这也正是 RVO 的核心思想。
Reciprocal Velocity Obstacle
RVO 的核心思想并不复杂,可以概括成一句话:
VO 认为“由我来避开对方”,而 RVO 认为“我们各自避让一步”。
代码上的逻辑实现也很简单,
1 | // main.rs |
现在张三和路人甲在自动避让时,与 VO 相比已经顺滑了不少,左右反复横跳的情况也明显减少了。
最后
RVO 也不是最终方案,它虽然把“单方面避让”改成了“双方各让一步”,但本质上依然是在假设对方会做出与自己一致的配合。在多人场景下,这种假设并不总是稳定。
因此还需要更进一步的改进,这也就是 ORCA 要解决的问题(挖个坑)。